Atividade
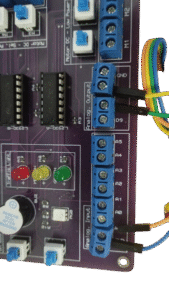
Conecte o sensor ultrassônico à estrutura do nosso rover explorador e à StepBoard. Os pinos para conexão são:
- Pino VCC do ultrassônico no VCC da StepBoard
- Pino GND do ultrassônico no GND da StepBoard
- Pino Trig do ultrassônico no D6 da StepBoard
- Pino Echo do ultrassônico no D5 da StepBoard
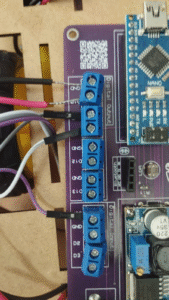
Posicione o sensor ultrassônico, sem fixá-lo, para que consiga verificar os pinos de cada fio. Para não se confundir, anote em seu Diário de Bordo qual cor de fio é cada pino.

Como falamos antes, o sensor ultrassônico emite um pulso (Trig), enviado pelo D6, e recebe um eco (echo), após a reflexão da onda sonora, detectada no D5.
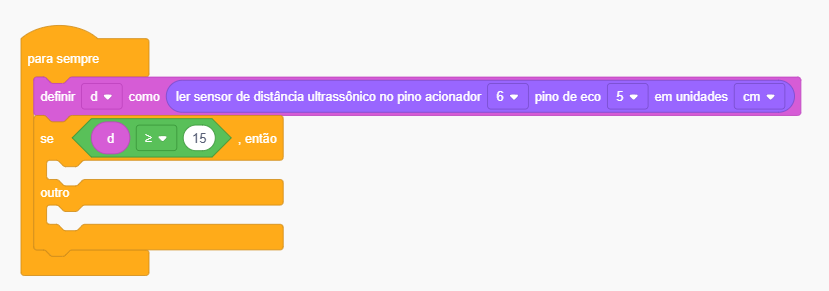
Para a programação, acesse o TinkerCAD e defina uma nova variável em que salvaremos a distância (utilize o nome “d”). Implemente o código que desliga o motor se existir obstáculos a distâncias menores do que 15 cm. Se não existir um obstáculo, ou ele estiver a mais de 15 cm, o rover continua sua trajetória, conforme o exemplo abaixo.
Dica: Use os códigos do motor da aula anterior, apenas altere a velocidade para 0 na condição de parada.
Teste o sensor ultrassônico e garanta o seu funcionamento adequado. Cuidado para não deixar obstáculos em sua frente, atrapalhando a medida.
O nosso segundo sensor é o microfone, posicione-o e anote em seu Diário de Bordo qual cor de fio é cada pino. Faça as ligações conforme descrito abaixo:
- Pino VCC/+ do microfone no VCC da StepBoard
- Pino GND/G do microfone no GND da StepBoard
- Pino Out/D0 do microfone no D11 da StepBoard
- Fio preto do buzzer no GND da StepBoard
- Pino vermelho do buzzer no D10 da StepBoard
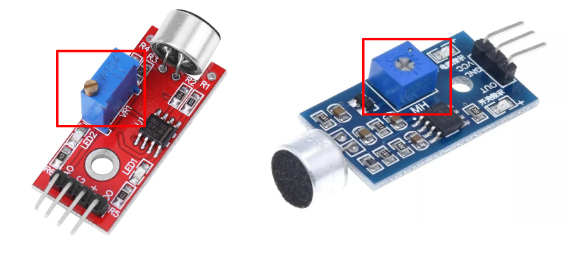
ATENÇÃO: Há dois modelos de sensor microfone disponíveis, a depender do StepKit. Ambos realizam as mesmas funções, identifique atentamente o seu modelo (conforme as imagens) e se atente às conexões elétricas corretas!

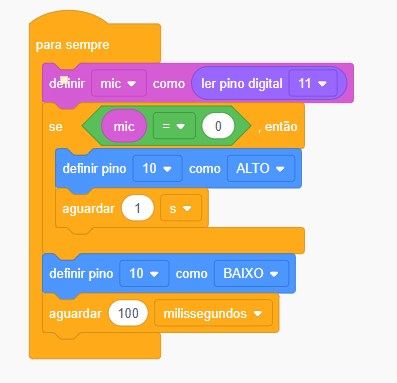
Para o código do microfone, escreva o código abaixo e teste o sensor de som! Para ajustar a sensibilidade, utiliza a chave de fenda do StepKit para alterar o seletor do microfone.
Dicas de missão
Aqui vão alguns testes base para auxiliar em sua tarefa:
- Quando há um número x de situações, provavelmente existirá um número x de condições do tipo se e se não.
- Para fazer uma leitura durante um intervalo determinado, utilize a seguinte estrutura:

No código acima, a variável t de tempo é incrementada de 5 em 5 ms, tal que é realizada uma contagem até 5000 ms (ou seja, 5 s)
3. Utilize variáveis para responder aos requisitos, como: “Se há vida, v = 1, se não há vida, v = 0”, sendo v uma variável aleatória.